|
|

|
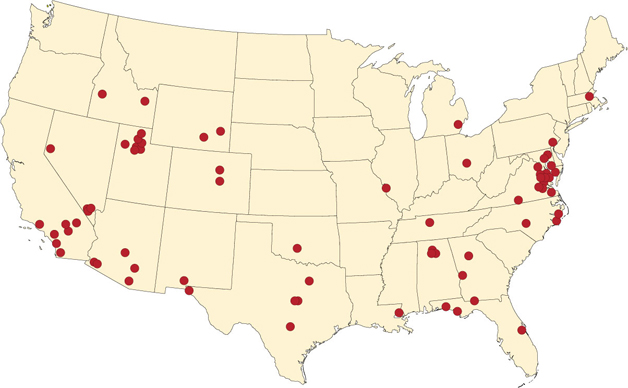
Aberdeen, MD (ATC)
Alexandria, VA (LIA, REF)
Alexandria, VA (Night Vision Labs)
Atlanta, GA
Barstow, CA
Boise, ID (NIFC)
Bonneville Salt Flats, UT (Access Rd)
Boston, MA
Camp Lejeune, NC (MARSOC)
Camp Pendleton, CA
Cherry Point, NC (MCAS)
Chesapeake Bay, VA
|
China Lake, CA (NAS)
Colorado Springs, CO
Columbus, OH
Corona, CA (NSWC)
Dahlgren, VA (NSWC)
Dallas, TX
Danville, VA
Detroit, MI (TARDEC)
Dugway, UT (DPG)
El Paso, TX (Ft. Bliss)
Fallon, NV (NAS)
Ft. Benning, GA (Robotics Rodeo)
Ft. Bragg, NC (SOCOM)
|
Ft. Hood, TX (III Corps)
Ft. Hood, TX (Robotics Rodeo)
Ft. Lee, VA (CASCOM)
Ft. Walton Beach, FL
(Eglin AFB)
Guernsey, WY (R2C2)
Huntsville, AL (RS JPO)
Huntsville, AL (TMO)
Idaho Falls, ID
Laramie, WY
Las Cruces, NM (WSMR)
Lawton, OK (Ft. Sill)
Lexington Park, MD
(PAX NAS)
|
Nashville, TN
NSWC Dahlgren, VA
Ogden, UT (Hill AFB)
Panama City, FL (Tyndall AFB)
Petersboro, UT,
Philadelphia, PA
Phoenix, AZ (Luke AFB)
Primm, NV
Primm, NV (RS JPO, JIEDDO)
Pt. Mugu (NAS)
Salt Lake City, UT
San Antonio, TX
San Diego, CA (SPAWAR)
|
Sonoita, AZ
(Ft. Huachuca)
St. Louis, MO
Stafford, VA
Tallahassee, FL
Titusville, FL
Tooele, UT (MMP)
Tucson, AZ
Victorville, CA (George AFB)
Washington, DC
Webster Field, MD
West Valley City, UT
Yuma, AZ (MCAS)
Yuma, AZ (YPG)
|
|---|
The following courses were created and driven using Kairos Autonomi's ProntoMimic software suite. Mimic has a unique 'record/play back' mode where an operator can drive a course while Mimic records the path. The operator can then push a play button built into the software, get out of the vehicle, and the software will drive the vehicle (play back) through the recorded course.
Click on the images to see a full RDDF generated from Pronto4 system software. The RDDF can be executed or added into a larger RNDF format. The actual RDDF files are available for qualified individuals. Please contact us for further information.
|
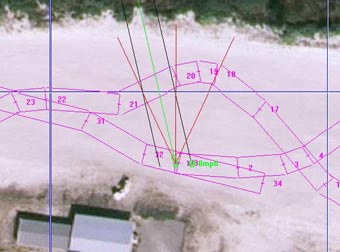
Unmanned Surface Vessel Test, November 2007
Kairos Autonomi installed a Pronto4 system on a boat and then performed testing on Yuba Lake in Utah.
Two types of testing were performed: a high-speed test on a looped course, and a lower-speed course on a figure-eight course.
High-Speed Video
+ Small (320 x 240, 5.55 mb)
+ Large (640 x 480, 25.7 mb)
+ Small (320 x 240, 5.16 mb)
+ Large (640 x 480, 10.6 mb)
Lower-Speed Video
+ Small (320 x 240,4.31 mb)
+ Large (640 x 480, 19.9 mb)
+ Small (320 x 240, 3.94 mb)
+ Large (640 x 480, 8.23 mb)
|
High-Speed Course
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size)
Lower-Speed Course
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size)
|
|---|
|
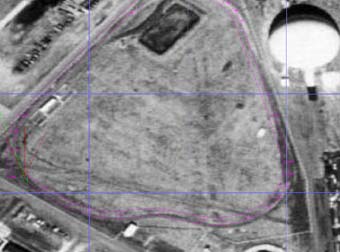
Remote Test Course, 2005 to Present
Kairos Autonomi uses the Bonneville Seabase for remote testing. Located west of Salt Lake City and south of the Great Salt Lake, this course is ideal for endurance and speed testing because of its remote location. The surface is a dry lake bed and the total testing area covers up to 12 square miles.
Recently, Kairos Autonomi performed a 4 hour semi-autonomous endurance test for a customer at this site.
|
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size)
|
|---|
|
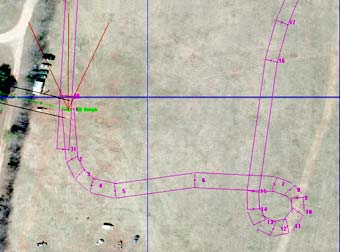
AUVSI Air/Ground Demo Day, Aug. 6, 2007
+ view video from this course
Kairos Autonomi performed an autonomous demonstration at Webster Field with the Pronto4 system agnostic to its commercial HMMWV. In the mock scenario, a Marine platoon requested a breach kit in order to enter an urban area and root out enemy combatants. The HMMWV drove an a course autonomously and provided video feedback to spectators.
Kairos Autonomi was one of a handful of companies to showcase UGV technology. A number of UAVs, including the Global Hawk and Fire Scout, also participated in the demonstration.
| 
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size) |
|---|
|
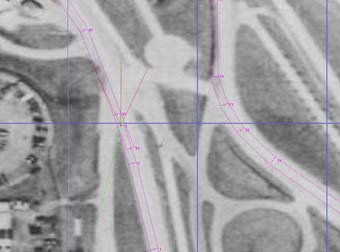
Customer Demonstration, August 2007
This course is located within the Patuxent River Naval Air Station. Kairos Autonomi was taken to the NAS's antenna farm, a large area when the HMMWV was able to drive out on a longer course and come back.
| 
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size) |
|---|
|
Long Distance Demonstration , August 2007
Kairos Autonomi performed this drive on the Harris farm in Hunstville, Alabama. The objective was to create a long distance course for the HMMWV to drive autonomously, and the drive included challenges such as a bridge, multiple sharp turns and curves in the road.
| 
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size) |
|---|
|
Demonstration at Tyndall AFB, August 2007
The HMMWV performed an autonomous drive for the Air Force Research Laboratory (AFRL) at its Large Robot Test Facility.
The autonomous vehicle path included two figure eights joined in the middle.
| 
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size) |
|---|
|
Demonstration for Robotic Systems Joint Program Office (RS JPO), August 2007
Kairos Autonomi performed an autonomous vehicle demonstration with the HMMWV. We rolled the vehicle off the trailer, set up the course, and drove within minutes.
| 
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size) |
|---|
|
Takach Compound, August 2007
A simple drive in a heavily wooded area.
| 
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size) |
|---|
|
Robotic Vehicle Test Course, August 2007
This is the first of two courses at Aberdeen Test Center where the HMMWV performed autonomous demonstrations.
| 
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size) |
|---|
|
Munson Test Course, August 2007
This is the second of two courses at Aberdeen Test Center where the HMMWV performed autonomous demonstrations. This course is much longer than the first course.
| 
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size) |
|---|
|
Urban Test Course, Fall 2006 to Present
This test course has been designed to simulate urban roads. It includes stop bars and stop signs, four way stops, railroad crossings, stop lights, four lane roads, one way roads, and various types of parking.
Kairos Autonomi has performed a number of tests at this course, including obstacle avoidance, four way stop precedence, braking distance, speed control and endurance.
| 
(to view full-size map, click on thumbnail above)
+ View entire map (not full-size) |
|---|
|